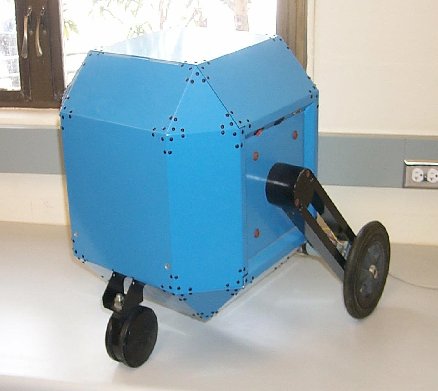
The Blue Cube
-
Where did it come from? Frontier Machine Control
Frontier Machine Control kindly donated a bare-bones PC Rover (sans PC)
to the Tech in early 1996. The robot had been on display for several months
in 1995 configured as a remote controlled camera platform. Visitors to
the museum could pilot the rover from a video game-like control cockpit
while watching the video from the Rover's camera via a wireless link. After
the remote-camera had finished it's display time, Eric Schwartz and myself
met with two of the founders of Frontier Machine Control: Stuart Davis,
Carlo Bertocchini and their software developer Frank Jenkins to develop
a long-term web-based interactive exhibit using the PC Rover. After several
months of meetings, the team had developed a truly unique, engaging exhibit
concept. We began work on fabricating the necessary hardware, and software
components to make the exhibit a reality. We lost contact with Frontier
Machine Control, for about a month, and heard the unfortunate news that
the companies' founders had a 'parting of the ways', and Frontier Machine
Control had been dissolved. This unfortunate incident put a halt on further
development on this exhibit. We were given back the PC Rover, and other
hardware being used for this project, and the robot was shelved at our
warehouse collecting dust until January 1 1998. The PC Rover's design,
and machine work is a tribute to Carlo's solid, precision ME skills, that
have lead him to victory in the 96, and 97 Robot Wars Competition, and
the SFRSA robot sumo competition for the last few years at the Exploratorium.
Update: 6/16/1999
The Blue Cube has a sibling!
Carlo recently contacted me via e-mail ad mentioned he has a new business,
RobotBooks.com,
and that he and Stewart had not spoken in some time. He also had another
PC Rover for sale, which I purchased this past weekend. The original PC
Rover contained a 'Baby-AT' size 386 motherboard, with 4M RAM, a 120M 2.5"
HD, a SoundBlaster card, custom 6 channel ISA LM629 servo controller board,
H-bridge driver circuit, custom power supply, 12V 7AH lead-acid battery,
and two gear-reduced
10V ECM motors with hall-effect
shaft encoders. Some of the units were equipped with an LCD panel,
a sonar ranging system, and a capacitor-discharge based A/D converter attached
to the game port for monitoring the battery level.
|

|
Carlo (In blue striped shirt, standing)
Stuart (Seated)
|
|
Carlo is now runs RobotBooks.com.
Check it out!
Main
Last Updated: 1/21/2001 Brian
Rudy
{kind=link}