
Hardware
- Vision
Sensors
- 6 MSP (Multi Sensor Processors) 68HC11-based sensor interface
boards
- 24 Sonar modules on upper enclosure
- 24 IR modules on upper enclosure, 32 on base.
- 24 bump panel microswitches on upper enclosure, 32 on base.
- SICK PLS200 Laser
rangefinder
(1 degree angular resolution (180 degree FOV))
Power
- 4 12VDC 33AH Gell cell batteries
- 48VDC subsystem
- +5VDC DC-DC converters
- 50W Base
- 400W Upper enclosure
- +12VDC
- +24VDC
- -12VDC
Locomotion
- MCP Motion Control Processor (68HC11-based motion controller)
- Synchro-drive locomotion system See this
page for info on how to build your own synchro-drive base.
Wireless LAN
- Linksys WET11
(802.11b Wireless Bridge)
CPUs
- CPU 1- Robot server
- Red Hat Linux 6.2,
kernel version 2.2.24
- Single processor 200MHz Pentium Pro 128M RAM 6G HDD
- Comtrol Rocketport 8 port serial card
- Computer Access Technology Corp. ISA ACCESS.bus Station
Card
- Kingston ISA 10Base-T/10Base-2 ethernet card
- Video Excel VGA card
- CPU 2- Personality server
- Red Hat Linux
7.2, kernel version 2.4.20 (SMP kernel)
- Dual processor 200MHz Pentium Pro 128M RAM 6G HDD
- bt848 video capture card
- SoundBlaster Live! sound card
- 3Com 3c589 10/100 ethernet card
- Mach64-based video card
- Aitech Web
Cable
Plus VGA to NTSC converter
Software
Here's the code!
Request Tracker
- Beesoft
- Servers
- tcxServer
- Allows modules to
communicate among each other both locally and over a network.
- baseServer
- Manages the MCP and MSP, provides locomotion and
sensor
functions.
- pantiltServer
- Manages the DP pan-tilt head, allows cameras to
track
a specified point in world coordinates while the robot is in motion.
- buttonServer- Manages the 4 user definable
buttons and their illuminators.
- laserServer- Manages the
SICK PLS200
- colliServer
- High-level program prevents collisions during motion.
Not used with wander and wander-laser. See here for
more info.
- obstacleServer- Integrates mapped obstacles from LOCALIZE as
colliServer
obstacles.
- voiceServer-
Interfaces with festival_server to generate speech cues and facial
animation
sequences for the zazaface applet onboard the robot and for web clients.
- POEfaceClient-
New optimized interface layer between voiceServer and >v2.0 zazaface
applets
- Applications
- wander
- Simple demo program. The robot wanders around in specified
radius using IR, Sonar, and the bump panels to navigate and build a
simple
obstacle map.
- wander-laser
- Enhanced version of wander adding laserServer
support
and command line switch for disabling pan-tilt for use with the
Simulator .
- wander-colli
- A crude hack of the above for basic
colliServer-based
wandering. EXPERIMENTAL
- buttoncall
- Simple button-driven program execution.
- reaction
- Uses laser to detect and react verbally with people, and
track them with the pantilt head.
- laserint- Integrates data from laser scans
and compensates for odometric drift to provide higher quality maps.
- map- map building application. See here
for
more info.
- LOCALIZE- Markov localization from known starting
position and orientation. See here and here
for more info.
- plan- 'Least cost' path planner. See here
for
more info.
- DETECTION- High-level people detection.
- Utilities
- zaza-web
- Simple Perl CGI for starting up and monitoring the status
of the servers and applications. (obsolete)
- battwatcher.pl
- Perl battery level monitor.
- abuswatcher.pl
- Perl baseServer MSP startup verification.
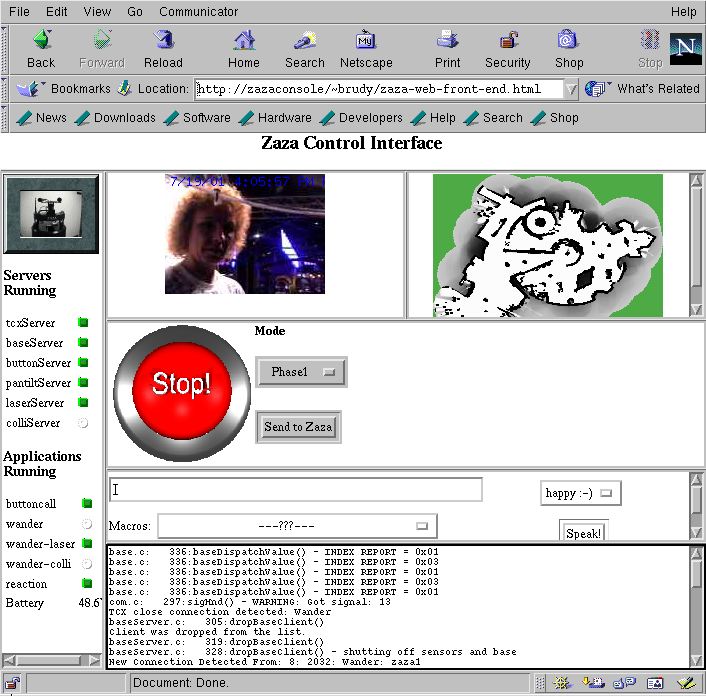
- Web Control (
screen shot )
- HTML
- Perl CGI
- e-stop
- Kills motion when the Stop! button image is clicked.
- process-mon
- Keeps track of the status of the BeeSoft
servers
and applications.
- voiceClient
- Allows web operator to select the robot's emotion, and manual speech
input.
Provisions for scripted cue input from speakit2.pl
- status-log
- Tail last 20 lines of the baseServer log.
- video
- Front-end for selecting FFmpeg video streams.
- zaza-control
- Select operating mode.
- Web-Based User Interface (
screen shot )
- HTML
- test
front-end - Test page with javascript needed for
auto-downloading
of plugin.
- Java Applet
- ZazaMap
- Plots the robot's position and orientation on the map in
real-time.
- zazaface-
Java applet that interfaces with faceClient to display Zaza's mouth on
the
LCD monitor 'face' and web clients.
- zazacam
- Streams images relayed from the robot's cameras.
- Perl CGI
- posServer
- Web-server interface layer between java applet and
poslib.
- faceClient
- Simple speech cue interface for zazaface applet. (obsolete)
- Perl Back-End
- poslib
- Interface layer between posServer and BeeSoft hooks.
- Beesoft C-hooks
- poslibtcx-
C interface layer between tcx and poslib.
Docs
FAQ
BeeSoft 1.2.2 Manual
Contact the maintainer
of this page.(Remove NO and SPAM before sending)
{kind=link}
{kind=link}